 ROS2
ROS2 SLAM (自己位置推定) のための Localization ~slam 設定調整~ (ROS2-Foxy)
SLAM (自己位置推定) のための Localization ~slam 設定調整~ (ROS2-Foxy)今回は、slam_settings.yaml のパラメータ変更時の挙動について説明していきます。
ROS2  ROS2
ROS2  AI
AI  AI
AI  ROS2
ROS2  OpenCV
OpenCV 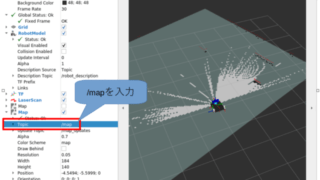 ROS2
ROS2  Python
Python  OpenCV
OpenCV  ROS2
ROS2