 ROS2
ROS2 SLAMで作成したMapでNavigation2 -自律移動編- (ROS2-Foxy)
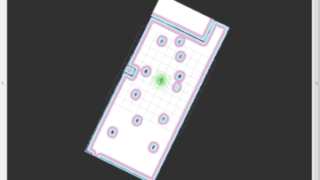
SLAMで作成したMapでNavigation2 -自律移動編- (ROS2-Foxy)今回は Navigation2 の最終編です。amcl による自己位置推定と path-planning による経路計画について解説していきます。
ROS2 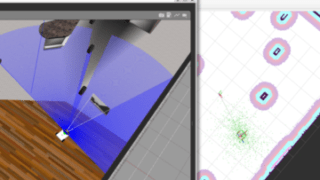 ROS2
ROS2  ROS2
ROS2  ROS2 ROS2
ROS2 ROS2  ROS2
ROS2 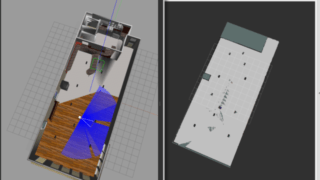 ROS2
ROS2 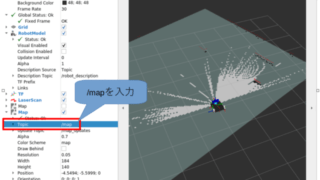 ROS2
ROS2  Python
Python  ROS2
ROS2