 AI
AI imu なし SLAM のための Localization ~Map作成~ (ROS2-Foxy)
imu なし SLAM のための Localization ~Map作成~ (ROS2-Foxy)imuなしでMap作成を行うためのファイルを用意していきます。
AI  Python
Python  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2 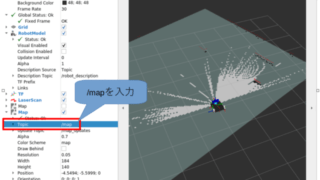 ROS2
ROS2  Python
Python  ROS2
ROS2  Python
Python  Python
Python