 AI
AI 軽量なインスタンスセグメンテーションYolact-Edgeをカスタムデータで学習する
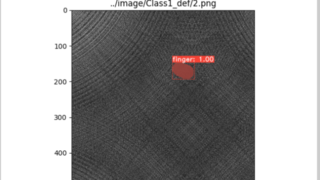
軽量なインスタンスセグメンテーションYolactEdgeをカスタムデータで学習する方法について説明します。YOLACTでは重くて使用できなかったデバイスでもYolactEdgeなら使用できるかもしれません。
AI  Python
Python  Python
Python  AI
AI  Python
Python  AI
AI  AI
AI  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2