はじめに
前回は Yolox をカスタムデータで学習させました。

今回は、物体の三次元姿勢推定のデモをテストしていきます。
前提条件
前提条件は以下の通りです。
- Ubuntu22.04
- Python3.10.x
- cuda12.2
実際にデモを動かしてみる
上から順に実行していけば、結果を確認できると思います。
しかしながら、やはりローカルで動かしたいと思いますので、少し改良していきます。
mkdir demo
python3 -m venv venv_centerSnap
source venv_centerSnap/bin/activate
python3 -m pip install -U pip
git clone https://github.com/zubair-irshad/CenterSnap.git
cd CenterSnap
wget https://www.dropbox.com/s/yfenvre5fhx3oda/nocs_test_subset.tar.gz?dl=1 -O nocs_test_subset.tar.gz && tar -xzvf nocs_test_subset.tar.gz次に必要な Python ライブラリをインストールしていきます。
python3 -m pip install torch==1.13.1+cu117 torchvision==0.14.1+cu117 torchaudio==0.13.1 --extra-index-url https://download.pytorch.org/whl/cu117
python3 -m pip install opencv-python open3d pytorch_lightning==0.7.5
python3 -m pip install shortuuid boto3 zstandard
python3 -m pip install colour scikit-image wandb
python3 -m pip install -U git+https://github.com/facebookresearch/fvcore.git
python3 -m pip install numpy==1.23.5
cd ..
touch explore_centersnap.py再び demo フォルダに移動して以下のプログラムを explore_centersnap.py を以下のように変更してください。
import argparse
import pathlib
import cv2
import numpy as np
import torch
import torch.nn.functional as F
import open3d as o3d
import matplotlib.pyplot as plt
import os
import time
import pytorch_lightning as pl
import _pickle as cPickle
import os, sys
sys.path.append('CenterSnap')
from simnet.lib.net import common
from simnet.lib import camera
from simnet.lib.net.panoptic_trainer import PanopticModel
from simnet.lib.net.models.auto_encoder import PointCloudAE
from utils.nocs_utils import load_img_NOCS, create_input_norm
from utils.viz_utils import depth2inv, viz_inv_depth
from utils.transform_utils import get_gt_pointclouds, transform_coordinates_3d, calculate_2d_projections
from utils.transform_utils import project
from utils.viz_utils import save_projected_points, draw_bboxes, line_set_mesh, display_gird, draw_geometries, show_projected_points
"""## 1. Instantiate CenterSnap Model"""
sys.argv = ['', '@CenterSnap/configs/net_config.txt']
parser = argparse.ArgumentParser(fromfile_prefix_chars='@')
common.add_train_args(parser)
app_group = parser.add_argument_group('app')
app_group.add_argument('--app_output', default='inference', type=str)
app_group.add_argument('--result_name', default='centersnap_nocs', type=str)
app_group.add_argument('--data_dir', default='CenterSnap/nocs_test_subset', type=str)
hparams = parser.parse_args()
min_confidence = 0.50
use_gpu=True
hparams.checkpoint = 'CenterSnap/nocs_test_subset/checkpoint/centersnap_real.ckpt'
model = PanopticModel(hparams, 0, None, None)
model.eval()
if use_gpu:
model.cuda()
data_path = open(os.path.join(hparams.data_dir, 'Real', 'test_list_subset.txt')).read().splitlines()
_CAMERA = camera.NOCS_Real()
def get_auto_encoder(model_path):
emb_dim = 128
n_pts = 2048
ae = PointCloudAE(emb_dim, n_pts)
ae.cuda()
ae.load_state_dict(torch.load(model_path))
ae.eval()
return ae
"""## 2. Perform inference using NOCS Real Subset"""
#num from 0 to 3 (small subset of data)
num = 0
img_full_path = os.path.join(hparams.data_dir, 'Real', data_path[num])
img_vis = cv2.imread(img_full_path + '_color.png')
left_linear, depth, actual_depth = load_img_NOCS(img_full_path + '_color.png' , img_full_path + '_depth.png')
input = create_input_norm(left_linear, depth)[None, :, :, :]
auto_encoder_path = os.path.join(hparams.data_dir, 'ae_checkpoints', 'model_50_nocs.pth')
ae = get_auto_encoder(auto_encoder_path)
if use_gpu:
input = input.to(torch.device('cuda:0'))
_, _, _ , pose_output = model.forward(input)
with torch.no_grad():
latent_emb_outputs, abs_pose_outputs, peak_output, _, _ = pose_output.compute_pointclouds_and_poses(min_confidence,is_target = False)
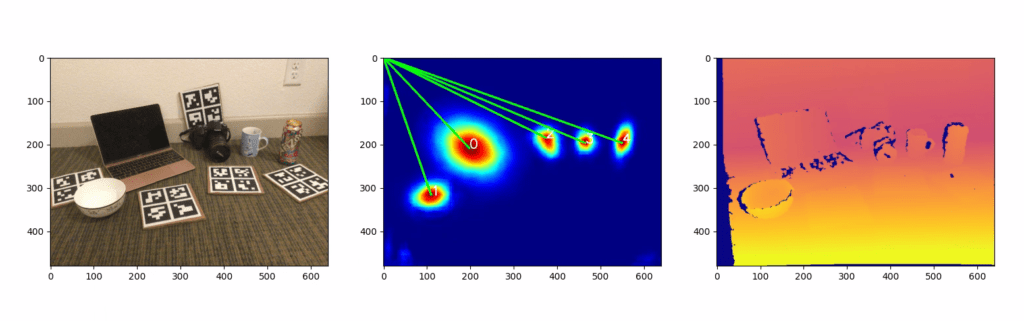
"""### 2.1 Visualize Peaks output and Depth output"""
display_gird(img_vis, depth, peak_output)
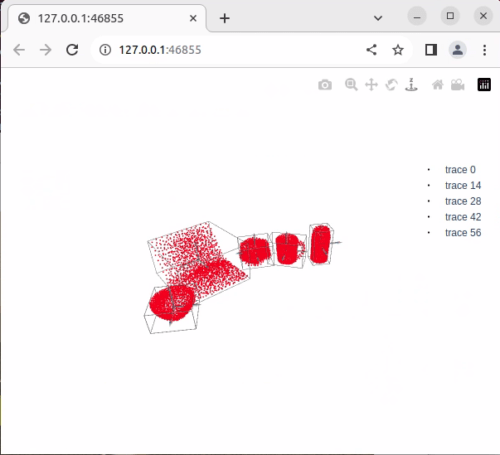
"""## 2.2 Decode shape from latent embeddings"""
write_pcd = False
rotated_pcds = []
points_2d = []
box_obb = []
axes = []
colors_array = []
boxes = []
for j in range(len(latent_emb_outputs)):
emb = latent_emb_outputs[j]
emb = latent_emb_outputs[j]
emb = torch.FloatTensor(emb).unsqueeze(0)
emb = emb.cuda()
_, shape_out = ae(None, emb)
shape_out = shape_out.cpu().detach().numpy()[0]
rotated_pc, rotated_box, _ = get_gt_pointclouds(abs_pose_outputs[j], shape_out, camera_model = _CAMERA)
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(rotated_pc)
print("rotated_pc", rotated_pc.shape)
rotated_pcds.append(pcd)
pcd.paint_uniform_color((1.0, 0.0, 0.0))
colors_array.append(pcd.colors)
mesh_frame = o3d.geometry.TriangleMesh.create_coordinate_frame(size=0.1, origin=[0, 0, 0])
T = abs_pose_outputs[j].camera_T_object
mesh_frame = mesh_frame.transform(T)
rotated_pcds.append(mesh_frame)
cylinder_segments = line_set_mesh(rotated_box)
for k in range(len(cylinder_segments)):
rotated_pcds.append(cylinder_segments[k])
points_mesh = camera.convert_points_to_homopoints(rotated_pc.T)
points_2d_mesh = project(_CAMERA.K_matrix, points_mesh)
points_2d_mesh = points_2d_mesh.T
points_2d.append(points_2d_mesh)
#2D output
points_obb = camera.convert_points_to_homopoints(np.array(rotated_box).T)
points_2d_obb = project(_CAMERA.K_matrix, points_obb)
points_2d_obb = points_2d_obb.T
box_obb.append(points_2d_obb)
xyz_axis = 0.3*np.array([[0, 0, 0], [0, 0, 1], [0, 1, 0], [1, 0, 0]]).transpose()
sRT = abs_pose_outputs[j].camera_T_object @ abs_pose_outputs[j].scale_matrix
transformed_axes = transform_coordinates_3d(xyz_axis, sRT)
projected_axes = calculate_2d_projections(transformed_axes, _CAMERA.K_matrix[:3,:3])
axes.append(projected_axes)
draw_geometries(rotated_pcds)
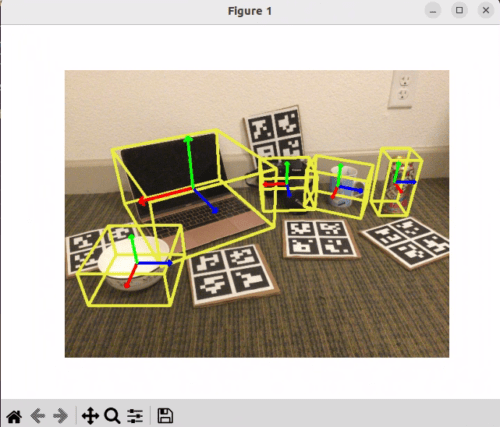
"""## 2.3 Project 3D Pointclouds and 3D bounding boxes on 2D image"""
color_img = np.copy(img_vis)
projected_points_img = show_projected_points(color_img, points_2d)
colors_box = [(63, 237, 234)]
im = np.array(np.copy(img_vis)).copy()
for k in range(len(colors_box)):
for points_2d, axis in zip(box_obb, axes):
points_2d = np.array(points_2d)
im = draw_bboxes(im, points_2d, axis, colors_box[k])
plt.gca().invert_yaxis()
plt.axis('off')
plt.imshow(im[...,::-1])
plt.show()ここまでできたら、explore_centersnap.py を実行します。
python3 explore_centersnap.py以下の結果が出力されます。
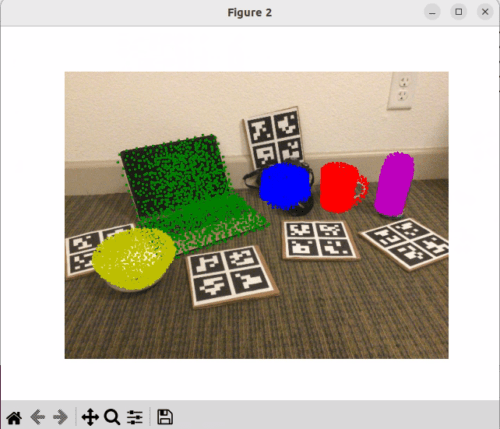
インスタンスセグメンテーションのように、各物体のカテゴリと座標が出力されます。
さらに、CenterSnap は各物体の向きも出力することが可能です。
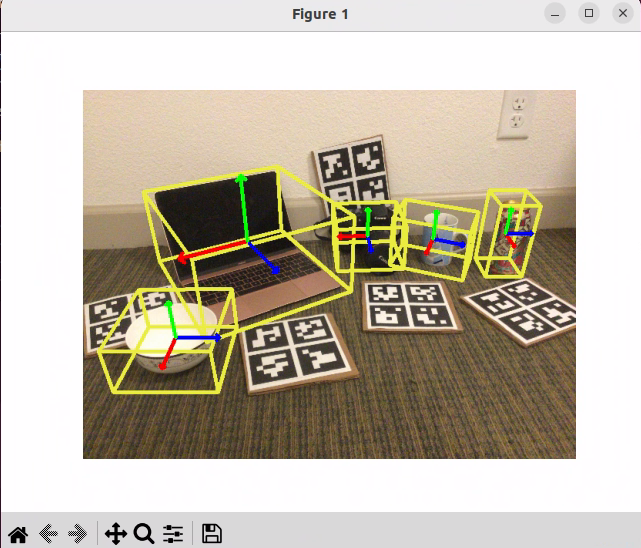
ここまで出力できるのに推論速度が速く、NVIDIA T1000 で動かせるAIはなかなかありません。ピック&プレースに非常に有用だと思います。
おわりに
今回は CenterSnap のデモをローカルのパソコンで動かせるようにしました。
これを使えば、工場の様々な場面で活躍すること間違いないと思います。
次回からは、 CenterSnap をカスタムデータで学習させる方法について説明していきます。


コメント