はじめに
前回までの記事で、マップ作成とパラメータ調整が完了しました。

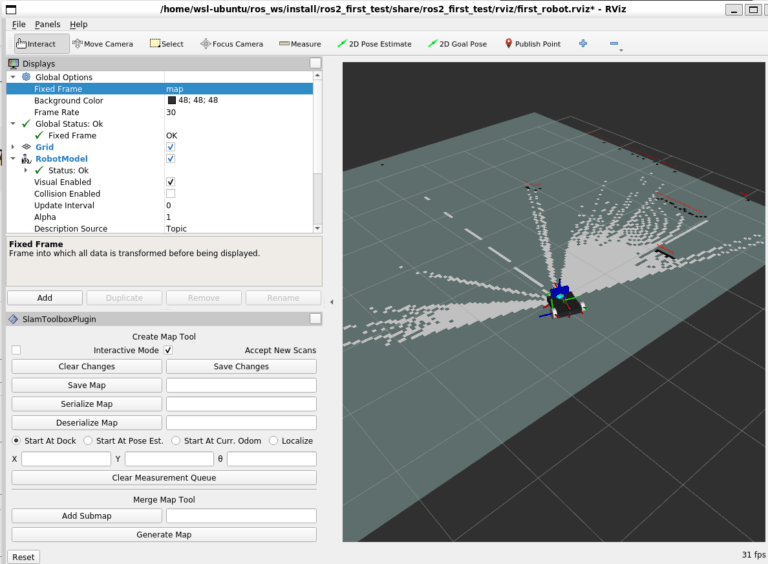
今回の記事では、作成したマップを使用して、経路探索+ゴールへ移動します。
少し長くなると思うので3回に分けようと思います。
前提条件
前提条件は以下の通りです。
- Map 作成が完了している
作成していない方はこちらの記事を参考にしてください。
Navigation2 について
Navigation2 の github はこちらにあります。
また、公式の解説ページはこちらです。
Navigation2 は、ロボットの自律行動に関するほとんどの機能を提供します。
- マップの読込、保存、topic パブリッシュ
- ロボットの確率的位置推定システムの提供 (amcl)
- 障害物を避けつつ目標値への経路計画 (Nav2 Planner)
- 経路に沿うようにロボットを制御 (Nav2 Controller)
- 作成した経路計画を平滑化 (Nav2 Smoother)
- センサデータをコストマップへと変換 (Costmap 2D)
- 障害が発生し、ロボットが経路に添えない場合の回復行動 (Nav2 Recoveries)
- 経路計画の各ポイントを辿る (Nav2 waypoint follower)
- ロボットの行動管理 (Nav2 behavior tree)
- ライフサイクルを管理 (Nav2 Lifecycle Manager)
- コア制御部分 (Nav2 Core)
Navigation2 は多機能すぎて、全てを理解するのは難しいですが、
全てを意識しなくてもうまく動きます。
インストールは既にこちらの記事で説明してありますが、再掲しておきます。
sudo apt install ros-foxy-navigation2 ros-foxy-nav2-bringup ros-foxy-turtlebot3*自立走行に必要なファイル
Navigation2 を使用した自立走行に必要なファイルは以下の二つです。
- Navigation2 の設定ファイル (.yaml)
- Navigation2 の起動ファイル (.launch.py)
- Navigation2 の rviz ファイル (.rviz)
Navigation2 の設定ファイル
Navigation2 の設定ファイルを作成していきます。
cd ros_ws/src/ros2_first_test
touch config/first_navigation.yamlfirst_navigation.yaml の中身は、こちらを参考に作成しました。
以下のコードを、first_navigation.yaml に記述してください。
amcl:
ros__parameters:
use_sim_time: True
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "differential"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scan
amcl_map_client:
ros__parameters:
use_sim_time: True
amcl_rclcpp_node:
ros__parameters:
use_sim_time: True
bt_navigator:
ros__parameters:
use_sim_time: True
global_frame: map
robot_base_frame: base_link
odom_topic: /odom
enable_groot_monitoring: True
groot_zmq_publisher_port: 1666
groot_zmq_server_port: 1667
default_bt_xml_filename: "navigate_w_replanning_and_recovery.xml"
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
bt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: True
controller_server:
ros__parameters:
use_sim_time: True
controller_frequency: 20.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
progress_checker_plugin: "progress_checker"
goal_checker_plugin: "goal_checker"
controller_plugins: ["FollowPath"]
# Progress checker parameters
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.5
movement_time_allowance: 10.0
# Goal checker parameters
goal_checker:
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
stateful: True
# DWB parameters
FollowPath:
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: True
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 0.52
max_vel_y: 0.0
max_vel_theta: 1.0
min_speed_xy: 0.0
max_speed_xy: 0.26
min_speed_theta: 0.0
# Add high threshold velocity for turtlebot 3 issue.
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
decel_lim_x: -2.5
decel_lim_y: 0.0
decel_lim_theta: -3.2
vx_samples: 20
vy_samples: 5
vtheta_samples: 20
sim_time: 1.7
linear_granularity: 0.05
angular_granularity: 0.025
transform_tolerance: 0.2
xy_goal_tolerance: 0.25
trans_stopped_velocity: 0.25
short_circuit_trajectory_evaluation: True
stateful: True
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"]
BaseObstacle.scale: 0.02
PathAlign.scale: 32.0
PathAlign.forward_point_distance: 0.1
GoalAlign.scale: 24.0
GoalAlign.forward_point_distance: 0.1
PathDist.scale: 32.0
GoalDist.scale: 24.0
RotateToGoal.scale: 32.0
RotateToGoal.slowing_factor: 5.0
RotateToGoal.lookahead_time: -1.0
controller_server_rclcpp_node:
ros__parameters:
use_sim_time: True
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: odom
robot_base_frame: base_link
use_sim_time: True
rolling_window: true
width: 3
height: 3
resolution: 0.05
robot_radius: 0.22
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.55
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
static_layer:
map_subscribe_transient_local: True
always_send_full_costmap: True
local_costmap_client:
ros__parameters:
use_sim_time: True
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: True
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
use_sim_time: True
robot_radius: 0.22
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.55
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: True
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: True
map_server:
ros__parameters:
use_sim_time: True
yaml_filename: "map.yaml"
map_saver:
ros__parameters:
use_sim_time: True
save_map_timeout: 5000
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: False
planner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: True
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5
use_astar: false
allow_unknown: true
planner_server_rclcpp_node:
ros__parameters:
use_sim_time: True
recoveries_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
recovery_plugins: ["spin", "back_up", "wait"]
spin:
plugin: "nav2_recoveries/Spin"
back_up:
plugin: "nav2_recoveries/BackUp"
wait:
plugin: "nav2_recoveries/Wait"
global_frame: odom
robot_base_frame: base_link
transform_timeout: 0.1
use_sim_time: true
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2
robot_state_publisher:
ros__parameters:
use_sim_time: True非常に長いです。が、一つずつ説明していきます。
amcl の設定
一行ずつ説明していると長いので、コードに書き込みました。
foxy がリリースされてから時間がたっているので、galactic用の説明を引用した部分もあります。
公式サイトはこちらです。
amcl は主に、地図上のロボットの位置を推定する役割を果たします。
Localization は amcl が管理します。
amcl:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
alpha1: 0.2 # ロボットの動きの回転成分から、オドメトリの回転推定で予想されるノイズを指定します。
alpha2: 0.2 # ロボットの動きの並進成分から、オドメトリの回転推定で予想されるノイズを指定します。
alpha3: 0.2 # ロボットの動きの並進コンポーネントから、オドメトリの並進推定で予想されるノイズを指定します。
alpha4: 0.2 # ロボットの動きの回転成分から、オドメトリの並進推定で予想されるノイズを指定します。
alpha5: 0.2 # 平行移動関連のノイズ パラメータ (モデルが"omni"(オムニホイール)の場合のみ使用)。
base_frame_id: "base_footprint" # ロボットベースフレーム
beam_skip_distance: 0.5 # 位置しないビームを無視する最大距離(m)
beam_skip_error_threshold: 0.9 # 位置推定が収束しない場合の一致しないビームの割合
beam_skip_threshold: 0.3 # sスキップに必要なビームのパーセンテージ
do_beamskip: false # ビームスキップを行うかどうか
global_frame_id: "map" # amcl で発行されるトピック名称
lambda_short: 0.1
laser_likelihood_max_dist: 2.0 # map 上で障害物を観測する最大距離(障害物のサイズ?)
laser_max_range: 100.0 # 最大スキャン範囲
laser_min_range: -1.0 # 最小スキャン範囲、-1でURDFより引用?
laser_model_type: "likelihood_field" # beam, likelihood_field, or likelihood_field_prob
set_initial_pose: False # ロボットの初期姿勢を .yaml で指定するかどうか
initial_pose: {x: 0.0, y: 0.0, z: 0.0, yaw: 0.0} # 初期姿勢
max_beams: 60 # フィルタ更新時の使用するビームの数
max_particles: 2000 # パーティクルの最大許容数
min_particles: 500 # 最小許容数
odom_frame_id: "odom" # オドメトリトピック
pf_err: 0.05 # パーティクルフィルタのエラー値
pf_z: 0.99 # パーティクルフィルタの密度
recovery_alpha_fast: 0.0 # リカバリタイミングを決める?
recovery_alpha_slow: 0.0 # リカバリタイミングを決める?
resample_interval: 1 # リカバリタイミングを決める?
robot_model_type: "differential" # galacticはnav2_amcl::DifferentialMotionModel or nav2_amcl::OmniMotionModel
save_pose_rate: 0.5 # 最後に推定されたポーズを保存する周期(Hz)、初期化時に呼び出し
sigma_hit: 0.2 # ガウス モデルの標準偏差
tf_broadcast: true # map - odom 間の変換を行うかどうか
transform_tolerance: 1.0 # 変換したタイムスタンプを更新する間隔(s)
update_min_a: 0.2 # フィルタ更新時の最小回転運動量
update_min_d: 0.25 # フィルタ更新時の最小並進運動量
z_hit: 0.5 # 重み
z_max: 0.05 # 重み
z_rand: 0.5 # 重み
z_short: 0.05 # 重み
scan_topic: scan # サブスクライブするスキャントピック
amcl_map_client:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
amcl_rclcpp_node:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうかamcl は、LIDAR と odom を使用して、ロボットの map 上での位置推定を実行します。
推定方法は、パーティクルフィルタと呼ばれるフィルタを使用します。
推定した粒子(パーティクル) の密度が最も高い所にロボットが存在するとしています。
bt_navigator
次に、bt_navigator の設定ファイルについて説明します。
公式サイトはこちらにあります。
bt_navigator:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
global_frame: map # 参照するマップトピック
robot_base_frame: base_link # bt の対象フレーム
odom_topic: /odom # 参照するオドメトリトピック
enable_groot_monitoring: True # groot を使用して Rviz2 上へ可視化するかどうか
groot_zmq_publisher_port: 1666 # groot 用ポート
groot_zmq_server_port: 1667 # groot 用ポート
default_bt_xml_filename: "navigate_w_replanning_and_recovery.xml" # デフォルトのファイルを使用します。
plugin_lib_names: # bt_navigator で使用するノードライブラリ
- nav2_compute_path_to_pose_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
bt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
bt_navigator はロボットの複雑なタスクを簡単化して設定できるようになります。
回復行動を含む行動を自分で実装しようと思うと非常に大変になりますので、AGV には必須です。
groot の公式説明はこちらにあります。
controller_server
controller_server の設定ファイルについて説明します。
公式サイトはこちらです。
controller_server は目標地点へ到達したかどうか、目標地点との差分を管理するプラグインです。
controller_server:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
controller_frequency: 20.0 # コントローラの実行周期(Hz)
min_x_velocity_threshold: 0.001 # x方向0.001m/s以下のオドメトリ指令を無視
min_y_velocity_threshold: 0.5 # y方向0.5m/s以下のオドメトリ指令を無視
min_theta_velocity_threshold: 0.001 # 回転角速度0.001rad/s以下の指令を無視
progress_checker_plugin: "progress_checker" # デフォルトのプラグイン
goal_checker_plugin: "goal_checker" # デフォルトのプラグイン
controller_plugins: ["FollowPath"] # デフォルトのプラグイン
# Progress checker parameters
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.5 # 0.5mより近いゴール位置を無視
movement_time_allowance: 10.0 # ロボットが最小半径を移動するのに要する時間
# Goal checker parameters
goal_checker:
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25 # ゴール判定の許容基準
yaw_goal_tolerance: 0.25 # ゴール判定の許容基準
stateful: True # 目標向きに回転後、xy位置を再判定するかどうか
# DWB parameters
FollowPath:
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: True # デバッグ用の軌跡を出力するかどうか
min_vel_x: 0.0 # x最小速度m/s
min_vel_y: 0.0 # y最小速度m/s
max_vel_x: 0.52 # x最大速度m/s
max_vel_y: 0.0 # y最大速度m/s
max_vel_theta: 1.0 # 最大角速度 rad/s
min_speed_xy: 0.0 # 最小並進速度m/s
max_speed_xy: 0.26 # 最大並進速度m/s
min_speed_theta: 0.0 # 最小角速度 rad/s
# Add high threshold velocity for turtlebot 3 issue.
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75
acc_lim_x: 2.5 # x最大加速度m/s^2
acc_lim_y: 0.0 # y最大加速度m/s^2
acc_lim_theta: 3.2 # 回転最大加速度rad/s^2
decel_lim_x: -2.5 # x最大減速度m/s^2
decel_lim_y: 0.0 # x最大減速度m/s^2
decel_lim_theta: -3.2 # 回転最大減速度rad/s^2
vx_samples: 20 # x方向の速度サンプル数
vy_samples: 5 # y方向の速度サンプル数
vtheta_samples: 20 # 角度方向の速度サンプル数
sim_time: 1.7 # 1.7s 先をシミュレート
linear_granularity: 0.05 # 投影する前方の直線距離(m)
angular_granularity: 0.025 # 投影する角度距離
transform_tolerance: 0.2 # tf変換の許容値
xy_goal_tolerance: 0.25 # ゴール判定の許容基準
trans_stopped_velocity: 0.25
short_circuit_trajectory_evaluation: True # 最高スコアのルートで固定
stateful: True
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"]
BaseObstacle.scale: 0.02 # BaseObstacle で判別する重み
PathAlign.scale: 32.0 # PathAlign で判別する重み
PathAlign.forward_point_distance: 0.1 # 角度の変化を計算するために、ロボットの0.1m先を使用
GoalAlign.scale: 24.0 # GoalAlign で判別する重み
GoalAlign.forward_point_distance: 0.1 # 角度の変化を計算するために、ロボットの0.1m先を使用
PathDist.scale: 32.0 # PathDist で判別する重み
GoalDist.scale: 24.0 # GoalDist で判別する重み
RotateToGoal.scale: 32.0 # RotateToGoal で判別する重み
RotateToGoal.slowing_factor: 5.0 # ゴールに向かって回転している間、ロボットの動作を遅くする重み
RotateToGoal.lookahead_time: -1.0 # >0 の場合、衝突を待つ時間
controller_server_rclcpp_node:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうかDWBController の設定項目はこちらに記載があります。
local_costmap と global_costmap
local_costmap と global_costmap の設定について説明します。
公式サイトの説明はこちらです。
costmap は障害物を判別して、通行可能 / 通行不可能を判別するプラグインです。
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0 # コストマップの更新周期
publish_frequency: 2.0 # コストマップの発信周期
global_frame: odom # 参照フレーム
robot_base_frame: base_link # ロボットのベースフレーム
use_sim_time: True # シミュレーション時間を使用するかどうか
rolling_window: true # コストマップがロボットのベースフレームと一緒に回転するかどうか
width: 3 # コストマップの幅(m)
height: 3 # コストマップの高さ(m)
resolution: 0.05 # コストマップ1px当たり判定の解像度
robot_radius: 0.22 # ロボット半径
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer: #指数関数的減衰でコストマップの致命的な障害物を膨らませます
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0 # コストマップの障害物判定半径の減衰係数
inflation_radius: 0.55 # コストマップの障害物判定半径を追加で膨らませる半径
voxel_layer: # 深度およびレーザー センサーの読み取り値とレイキャスティングを使用して永続的な 3D ボクセル レイヤーを維持し、空き領域をクリアします
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True # 有効化
publish_voxel_map: True # デバッグ用に3Dボクセルマップを出力するかどうか
origin_z: 0.0 # ボクセルマークの開始位置
z_resolution: 0.05 # ボクセル高さの解像度
z_voxels: 16 # ボクセル数?
max_obstacle_height: 2.0 # ボクセルマップの最大高さ
mark_threshold: 0 # ボクセルの最小数
observation_sources: scan # ボクセル作成用のソース
scan:
topic: /scan
max_obstacle_height: 2.0 # ボクセルマップの最大高さ
clearing: True # コストマップでscanをクリアするかどうか
marking: True # scan をマークするかどうか
data_type: "LaserScan" # データタイプ
static_layer:
map_subscribe_transient_local: True # マップトピックのQoS設定
always_send_full_costmap: True # 地図の更新周期ごとに完全なコストマップを送信するかどうか
local_costmap_client:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
use_sim_time: True # シミュレーション時間を使用するかどうか
robot_radius: 0.22
resolution: 0.05
track_unknown_space: true # true:不明なスペースを空き領域として扱わない
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer: # レイキャスティングを使用して 2D レーザー スキャンから永続的な 2D コストマップを維持し、空き領域をクリアします
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.55
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか各レイヤーの説明はこちらにあります。
map_server と map_saver
map_server と map_saver について説明します。
公式サイトの説明はこちらです。
map_server / map_saver は地図を管理するプラグインです。
map_server:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
yaml_filename: "map.yaml" # map 設定ファイルの保存場所
map_saver:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
save_map_timeout: 5000 # map 保存を試みるタイムアウト時間
free_thresh_default: 0.25 # グリッドマップの空き領域の判別しきい値
occupied_thresh_default: 0.65 # グリッドマップの占有判別しきい値
map_subscribe_transient_local: False # 説明なし→なくなった?planner_server
planner_server についての説明です。
公式の説明はこちらになります。
planner_server は経路計画を管理します。
planner_server:
ros__parameters:
expected_planner_frequency: 20.0 # プランナーの頻度
use_sim_time: True # シミュレーション時間を使用するかどうか
planner_plugins: ["GridBased"] # 使用するプラグイン
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 0.5 # 要求されたゴールと経路計画の終点との差の許容値
use_astar: false # A* を使用するかどうか ※要調査
allow_unknown: true # 未知空間への経路計画を許容するかどうか
planner_server_rclcpp_node:
ros__parameters:
use_sim_time: True # シミュレーション時間を使用するかどうか
NavfnPlanner の説明はこちらにあります。
recoveries_server
recoveries_server について説明します。
公式サイトの説明はこちらです。
recoveries_server は衝突しそうな時の挙動を管理します。
recoveries_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw # local_costmap からサブスクライブ
footprint_topic: local_costmap/published_footprint # local_costmap からサブスクライブ
cycle_frequency: 10.0 # 実行頻度
recovery_plugins: ["spin", "back_up", "wait"] # 使用するプラグイン
spin:
plugin: "nav2_recoveries/Spin"
back_up:
plugin: "nav2_recoveries/BackUp"
wait:
plugin: "nav2_recoveries/Wait"
global_frame: odom # 参照フレーム
robot_base_frame: base_link # ロボットベースフレーム
transform_timeout: 0.1 # tf 変換のタイムアウト時間 (s)
use_sim_time: true # シミュレーション時間を使用するかどうか
simulate_ahead_time: 2.0 # 衝突先読み時間 (s)
max_rotational_vel: 1.0 # 最大回転速度 (rad/s)
min_rotational_vel: 0.4 # 最小回転速度 (rad/s)
rotational_acc_lim: 3.2 # 最大回転加速度 (rad/s^2)
おわりに
今回は Navigation2 に必要な設定ファイルについて説明しました。
23000文字を超えました。。。
必要な時に公式サイトとともに見返していただけたらと思います。
次回は、残りの起動ファイルと rviz2 設定ファイルについて説明していきます。
コメント