 ROS2
ROS2 Dobot MG400 の各jointへ数値を送信 URDF修正編【ROS2-Foxy】
Dobot MG400 の各jointへ数値を送信 URDF修正編【ROS2-Foxy】今回は 目標値へMG400 を動かすために、URDFを修正していきます。
ROS2  ROS2
ROS2 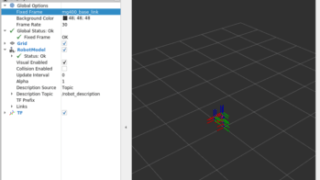 ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2