 Python
Python Gazeboシミュレート上のカメラをOpenCVで取得する (ROS2-Foxy)
Gazeboシミュレート上のカメラをOpenCVで取得する方法を説明します。取得した画像から、障害物を検知し、動作命令を追加していきます。
Python 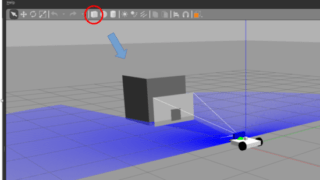 Python
Python  Python
Python 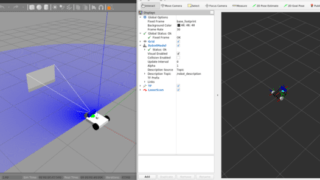 Python
Python 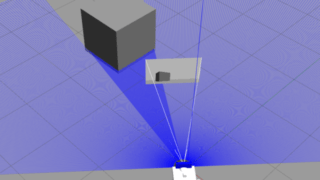 ROS2
ROS2 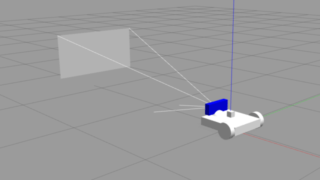 ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2