 ROS2
ROS2 SLAMで作成したMapでNavigation2 -モデル修正編- (ROS2-Foxy)
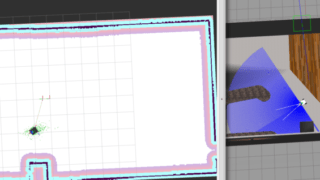
SLAMで作成したMapでNavigation2 -モデル修正編- (ROS2-Foxy)今回で最後となります。バック走しているロボットを正常に走行させます。その過程で、AGV作成のおさらいをしていけたらと思います。
ROS2 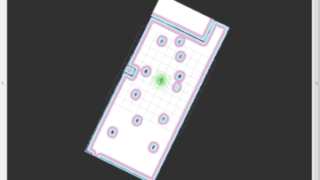 ROS2
ROS2 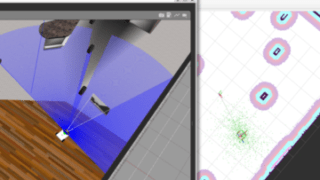 ROS2
ROS2  ROS2
ROS2  ROS2
ROS2