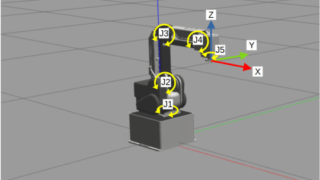
Python Dobot MG400 に目標値を送信して移動【ROS2-Foxy】 Dobot MG400 に目標値を送信して移動【ROS2-Foxy】今回は、xyzの目標値から逆運動学で算出した各 joint の値へMG400 を移動させる方法について説明します。 2023.02.04 PythonROS2テック
Python 目的地の座標から Dobot MG400 の 各joint の値を逆算【ROS2-Foxy】 目的地の座標から Dobot MG400 の 各関節の値を逆算する方法について説明します。逆運動学のパッケージを用いて、簡単に算出することが可能になります。 2023.01.24 PythonROS2テック
 Python
Python