 Python
Python Gazebo シミュレート上でLIDARをPythonで処理する(ROS2-Foxy)
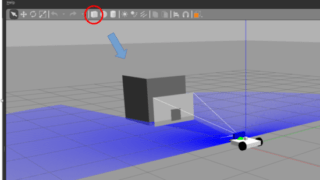
Gazebo シミュレート上でLIDAR,をPythonで処理します(ROS2-Foxy)LIDARのデータの確認方法とデータの取り扱い方について解説していきます。
Python  Python
Python 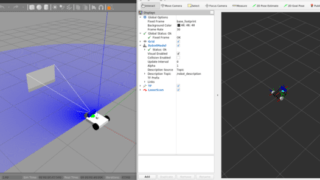 Python
Python 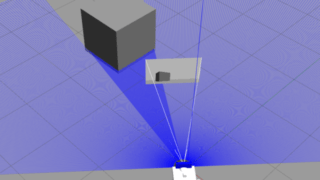 ROS2
ROS2 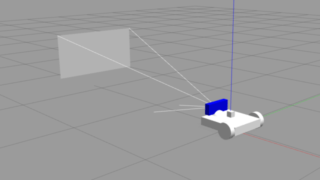 ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2