 AI
AI 物体の三次元姿勢推定 Gen6D をカスタムデータで実行する【Windows11, Python】
物体の三次元姿勢推定 Gen6D をカスタムデータで実行する【Windows11, Python】今回は Gen6D をカスタムデータで実行する方法について説明します。併せて、検出精度も確認していきます。
AI 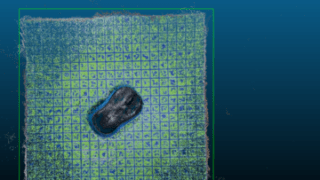 AI
AI  Python
Python  AI
AI  Python
Python  Python
Python  AI
AI  AI
AI  Python
Python  Python
Python