はじめに
前回の記事では、Open3D と Blender で点群データの表示を行いました。

今回の記事では、二つの点群データを合成する方法について説明します。
前提条件
前提条件は以下の通りです。
- pyrealsense2
- OpenCV ==4.6.0
- Python == 3.9.13
- Windows11
- open3D = 0.16.0
事前準備
事前準備として、Realsense で二つの角度から撮影した点群データを用意します。
正面から撮影したファイルを “output-front.ply”
斜めから撮影したファイルを “output-side.ply”
として保存します。
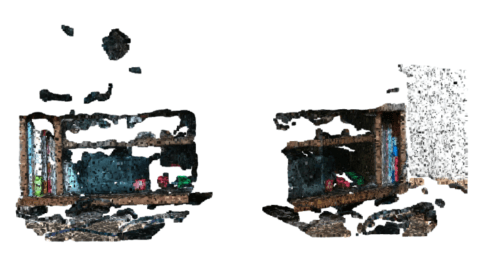
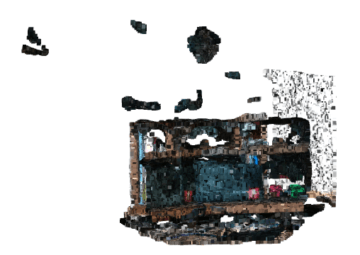
二つの点群データを一つの window 上で合成せずに表示すると以下のようになります。
ずれていますね。今回はこれを合成していきます。
点群データ合成プログラム
早速、合成プログラムを以下に記載します。
こちらのプログラムは、Open3D の 公式example のコードを少し変更したものです。
import open3d as o3d
import numpy as np
# load pcd data
def load_point_clouds(voxel_size=0.0, pcd_data=""):
pcds = []
for i in range(len(pcd_data)):
pcd = o3d.io.read_point_cloud(pcd_data[i])
pcd.paint_uniform_color([1-i, 0.706, i])
pcd_down = pcd.voxel_down_sample(voxel_size=voxel_size)
pcds.append(pcd_down)
return pcds
def pairwise_registration(source, target, max_correspondence_distance_coarse,
max_correspondence_distance_fine):
print("Apply point-to-plane ICP")
icp_coarse = o3d.pipelines.registration.registration_icp(
source, target, max_correspondence_distance_coarse, np.identity(4),
o3d.pipelines.registration.TransformationEstimationPointToPlane())
icp_fine = o3d.pipelines.registration.registration_icp(
source, target, max_correspondence_distance_fine,
icp_coarse.transformation,
o3d.pipelines.registration.TransformationEstimationPointToPlane())
transformation_icp = icp_fine.transformation
information_icp = o3d.pipelines.registration.get_information_matrix_from_point_clouds(
source, target, max_correspondence_distance_fine,
icp_fine.transformation)
return transformation_icp, information_icp
def full_registration(pcds, max_correspondence_distance_coarse, max_correspondence_distance_fine):
pose_graph = o3d.pipelines.registration.PoseGraph()
odometry = np.identity(4)
pose_graph.nodes.append(o3d.pipelines.registration.PoseGraphNode(odometry))
n_pcds = len(pcds)
for source_id in range(n_pcds):
for target_id in range(source_id + 1, n_pcds):
transformation_icp, information_icp = pairwise_registration(
pcds[source_id], pcds[target_id],
max_correspondence_distance_coarse,
max_correspondence_distance_fine)
print("Build o3d.pipelines.registration.PoseGraph")
if target_id == source_id + 1: # odometry case
print("odometry case")
odometry = np.dot(transformation_icp, odometry)
pose_graph.nodes.append(o3d.pipelines.registration.PoseGraphNode(np.linalg.inv(odometry)))
pose_graph.edges.append(o3d.pipelines.registration.PoseGraphEdge(source_id,
target_id, transformation_icp, information_icp, uncertain=False))
else: # loop closure case
print("loop closure")
pose_graph.edges.append(o3d.pipelines.registration.PoseGraphEdge(source_id,
target_id, transformation_icp, information_icp, uncertain=True))
return pose_graph
if __name__ == "__main__":
voxel_size = 0.005
pcd_data = ["output-front.ply", "output-side.ply"]
pcds_down = load_point_clouds(voxel_size, pcd_data)
o3d.visualization.draw_geometries(pcds_down, "vovel sampling")
print("Full registration ...")
max_correspondence_distance_coarse = voxel_size * 15
max_correspondence_distance_fine = voxel_size * 1.5
# debug full registration
with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm:
pose_graph = full_registration(pcds_down,
max_correspondence_distance_coarse,
max_correspondence_distance_fine)
print("Optimizing PoseGraph ...")
option = o3d.pipelines.registration.GlobalOptimizationOption(
max_correspondence_distance=max_correspondence_distance_fine,
edge_prune_threshold=0.25,
reference_node=0)
# debug optimizing posegraph
with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm:
o3d.pipelines.registration.global_optimization(
pose_graph,
o3d.pipelines.registration.GlobalOptimizationLevenbergMarquardt(),
o3d.pipelines.registration.GlobalOptimizationConvergenceCriteria(),
option)
print("Transform points and display")
for point_id in range(len(pcds_down)):
print(pose_graph.nodes[point_id].pose)
pcds_down[point_id].transform(pose_graph.nodes[point_id].pose)
o3d.visualization.draw_geometries(pcds_down)非常に難解でした。理解できていない部分がありますので、説明しながら理解していきます。
早速、実行します。
最初の window の表示はこのようになります。
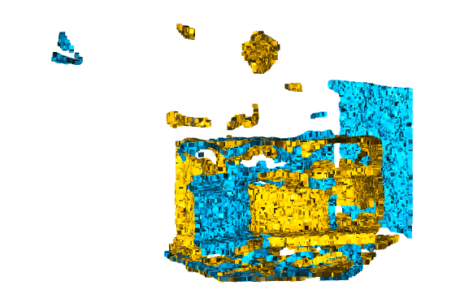
黄色と水色はそれぞれ角度の異なる点群データです。
window を閉じて、1s 程度経過すると合成された結果が表示されます。
完全に合成されてはいないですが、角度変換は合っているので、続けていきます。
プログラム説明
元データの読込と表示
はじめに、メイン関数から説明していきます。サブ関数が現れた時点で、サブ関数の説明に移ります。
voxel_size = 0.005
pcd_data = ["output-front.ply", "output-side.ply"]
pcds_down = load_point_clouds(voxel_size, pcd_data)
o3d.visualization.draw_geometries(pcds_down, "vovel sampling")voxel_size と draw_geometries による複数の点群データの表示方法については、前回説明したので割愛します。
load_point_clouds
load_point_clouds 関数について説明していきます。
# load pcd data
def load_point_clouds(voxel_size=0.0, pcd_data=""):
pcds = []
for i in range(len(pcd_data)):
pcd = o3d.io.read_point_cloud(pcd_data[i])
pcd.paint_uniform_color([1-i, 0.706, i])
pcd_down = pcd.voxel_down_sample(voxel_size=voxel_size)
pcds.append(pcd_down)
return pcdso3d.io.read_point_cloud() で、.ply データを読み込みます。
paint_uniform_color([1-i, 0.706, i]) で、読み込んだ点群に色を付けます。
paint_uniform_color() の説明は公式ドキュメントの中腹にあります。
リスト内は RGB 表記で、全て 0 – 1 で記述します。
vocel_down_sample で、ダウンサンプリングを実行します。
複数の点群リストを pcds としてまとめます。
Pose Graph の作成
print("Full registration ...")
max_correspondence_distance_coarse = voxel_size * 15
max_correspondence_distance_fine = voxel_size * 1.5
# debug full registration
with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm:
pose_graph = full_registration(pcds_down,
max_correspondence_distance_coarse,
max_correspondence_distance_fine)- max_correspondence_distance_coarse … 対応するボクセル間を切り離す最大距離
初期スクリーニングで相関有とみなす距離? - max_correspondence_distance_fine … 対応するボクセル間の相関が強いとする最大距離
o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm
は、with 内の Open3D の挙動に関して、Debugログ を表示する関数です。
pose_graph = full_registration(pcds_down,
max_correspondence_distance_coarse,
max_correspondence_distance_fine)full_registration について説明していきます。
full_registration
full_registration では、各点群データをまとめて Pose Graph 形式に変換します。
def full_registration(pcds, max_correspondence_distance_coarse, max_correspondence_distance_fine):
pose_graph = o3d.pipelines.registration.PoseGraph()
odometry = np.identity(4)
pose_graph.nodes.append(o3d.pipelines.registration.PoseGraphNode(odometry))
n_pcds = len(pcds)
for source_id in range(n_pcds):
for target_id in range(source_id + 1, n_pcds):
transformation_icp, information_icp = pairwise_registration(
pcds[source_id], pcds[target_id],
max_correspondence_distance_coarse,
max_correspondence_distance_fine)
print("Build o3d.pipelines.registration.PoseGraph")
if target_id == source_id + 1: # odometry case
print("odometry case")
odometry = np.dot(transformation_icp, odometry)
pose_graph.nodes.append(o3d.pipelines.registration.PoseGraphNode(np.linalg.inv(odometry)))
pose_graph.edges.append(o3d.pipelines.registration.PoseGraphEdge(source_id,
target_id, transformation_icp, information_icp, uncertain=False))
else: # loop closure case
print("loop closure")
pose_graph.edges.append(o3d.pipelines.registration.PoseGraphEdge(source_id,
target_id, transformation_icp, information_icp, uncertain=True))
return pose_graphこちらの関数も順に説明していきます。
pose_graph = o3d.pipelines.registration.PoseGraph()
odometry = np.identity(4)
pose_graph.nodes.append(o3d.pipelines.registration.PoseGraphNode(odometry))空の PoseGraph を作成し、4×4 の単位行列を作成します。
この単位行列を 空のPoseGraph の先頭ノードに登録します。
次は、点群データの数だけ source と target をペアにしていきます。
transformation_icp, information_icp = pairwise_registration(
pcds[source_id], pcds[target_id],
max_correspondence_distance_coarse,
max_correspondence_distance_fine)pairwise_registration について説明していきます。
pairwise_registration
先に、コードを掲載します。
def pairwise_registration(source, target, max_correspondence_distance_coarse,
max_correspondence_distance_fine):
print("Apply point-to-plane ICP")
icp_coarse = o3d.pipelines.registration.registration_icp(
source, target, max_correspondence_distance_coarse, np.identity(4),
o3d.pipelines.registration.TransformationEstimationPointToPlane())
icp_fine = o3d.pipelines.registration.registration_icp(
source, target, max_correspondence_distance_fine,
icp_coarse.transformation,
o3d.pipelines.registration.TransformationEstimationPointToPlane())
transformation_icp = icp_fine.transformation
information_icp = o3d.pipelines.registration.get_information_matrix_from_point_clouds(
source, target, max_correspondence_distance_fine,
icp_fine.transformation)
return transformation_icp, information_icppairwise_registration 関数は、source と target を引数とします。
icp_coarse = o3d.pipelines.registration.registration_icp(
source, target, max_correspondence_distance_coarse, np.identity(4),
o3d.pipelines.registration.TransformationEstimationPointToPlane())o3d.pipelines.registration.registration_icp() はこちらの公式ドキュメントに記載があります。
o3d.pipelines.registration.TransformationEstimationPointToPlane() は、点群間の変換推定の方法を指定します。
ICPについては、こちらの Wikipedia を参照ください。
簡単に言うと、点群sourceと点群targetの各点を比較し、距離が最も近いものを同じ点とみなします。なので、大きなずれや角度変化に弱く、Realsense の撮影場所は近い必要があります。
今回のデータとは全くマッチしていません。改善策は別の記事にて説明します。
icp_fine = o3d.pipelines.registration.registration_icp(
source, target, max_correspondence_distance_fine,
icp_coarse.transformation,
o3d.pipelines.registration.TransformationEstimationPointToPlane())こちらも同じ関数です、与える変数が少し異なります。
icp_coarse で初期スクリーニングを行い、icp_fine で、本命の点を洗いだします。
戻り値は、変換に関する情報 (open3d.pipelines.registration.RegistrationResult) です。こちらに記載があります。
transformation_icp = icp_fine.transformation変換行列を transformation_icp 変数に代入します。
information_icp = o3d.pipelines.registration.get_information_matrix_from_point_clouds(
source, target, max_correspondence_distance_fine,
icp_fine.transformation)変換行列から情報行列を作成します。関数の詳細はこちらです。
full_registration 続き
pairwise_registration が完了したら、戻り値の変換行列と情報行列をしようして PoseGraph を作成していきます。
if target_id == source_id + 1: # odometry case
print("odometry case")
odometry = np.dot(transformation_icp, odometry)
pose_graph.nodes.append(o3d.pipelines.registration.PoseGraphNode(np.linalg.inv(odometry)))
pose_graph.edges.append(o3d.pipelines.registration.PoseGraphEdge(source_id,
target_id, transformation_icp, information_icp, uncertain=False))隣り合う点群データの場合、(ICPならでは?) 単位行列と変換行列の積で odometry を更新します。
PoseGraphノードに更新した odometry の逆行列
PoseGraphエッジに sourceのID, targetのID, 変換行列、情報行列を登録します。source と隣り合う点群データなので、本当に先端エッジかどうかわかりません。この場合、Uncertain=False とします。詳細はこちらです。
else: # loop closure case
print("loop closure")
pose_graph.edges.append(o3d.pipelines.registration.PoseGraphEdge(source_id,
target_id, transformation_icp, information_icp, uncertain=True))隣り合う点群データでない場合、PoseGraphエッジのみに登録を行います。エッジであることは明確なので、uncertain=True とします。
グローバル最適化
PoseGraph の作成が終わったら、グローバル最適化を実行します。
その前に、グローバル最適化用のオプションを作成します。
option = o3d.pipelines.registration.GlobalOptimizationOption(
max_correspondence_distance=max_correspondence_distance_fine,
edge_prune_threshold=0.25,
reference_node=0)o3d.pipelines.registration.GlobalOptimizationOption() の説明はこちらにあります。
使用する点群データが少ないので、とりあえずデフォルトにしておきます。
各引数は
- max_correspondence_distance … 隣接点とみなす最大距離
- edge_prune_threshold … 枝刈りのしきい値
- reference_node … 固定するノード
となります。
o3d.pipelines.registration.global_optimization(
pose_graph,
o3d.pipelines.registration.GlobalOptimizationLevenbergMarquardt(),
o3d.pipelines.registration.GlobalOptimizationConvergenceCriteria(),
option)o3d.pipelines.registration.global_optimization() は、作成した PoseGraph を最適化します。
詳細はこちらにあります。
o3d.pipelines.registration.GlobalOptimizationLevenbergMarquardt() は、最適化メソッドを指定します。GlobalOptimizationGaussNewton() もあります。
o3d.pipelines.registration.GlobalOptimizationConvergenceCriteria() は、収束基準を指定します。
最適化結果の表示
最後に、表示部分です。
print("Transform points and display")
for point_id in range(len(pcds_down)):
print(pose_graph.nodes[point_id].pose)
pcds_down[point_id].transform(pose_graph.nodes[point_id].pose)
o3d.visualization.draw_geometries(pcds_down)pcds_down[point_id].transform(pose_graph.nodes[point_id].pose) で、元の点群データを変換します。
色付けしていない結果
改めて、合成前の結果を載せておきます。
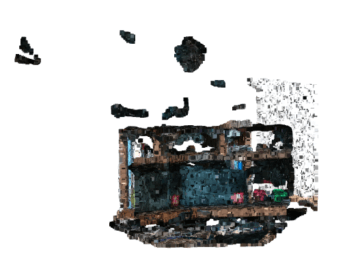
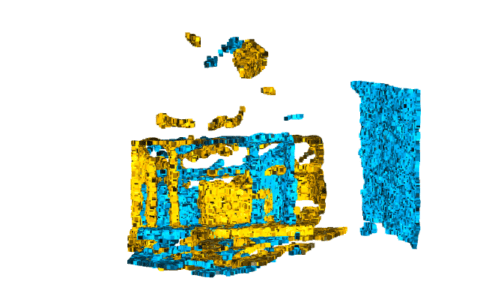
合成結果は、以下のようになります。
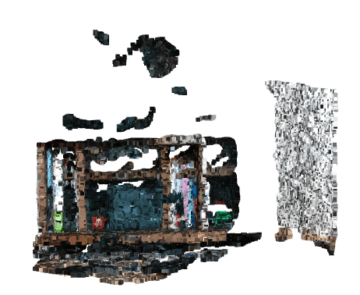
別の角度から見てみます。

何となく合っています。
おわりに
今回は点群合成の方法について説明しました。
問題点は
- PoseGraph作成メソッドが今回のデータに適していないこと
- 点群データが少ないこと
が、挙げられます。
次回は、上記の問題点を改善しようと思います。

コメント