はじめに
前回は、点群データの合成を行いましたが、きれいに合成はできませんでした。
そこで今回は、合成できる条件を検証していきます。
前提条件
前提条件は、以下の通りです。
- pyrealsense2
- OpenCV ==4.6.0
- Python == 3.9.13
- Windows11
- open3D = 0.16.0
点群データの用意
キャプチャ用のプログラムを掲載しておきます。
“c” を押すと capture フォルダに点群データが保存されます。
import pyrealsense2 as rs
import numpy as np
import cv2
import open3d as o3d
import datetime
# Configure depth and color streams
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)
# Start streaming
pipeline.start(config)
align = rs.align(rs.stream.color)
vis = o3d.cuda.pybind.visualization.Visualizer()
vis.create_window('PCD', width=640, height=480)
pointcloud = o3d.cuda.pybind.geometry.PointCloud()
geom_added = False
number = 1
while True:
dt0 = datetime.datetime.now()
frames = pipeline.wait_for_frames()
frames = align.process(frames)
profile = frames.get_profile()
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame()
if not depth_frame or not color_frame:
continue
# Convert images to numpy arrays
depth_image = np.asanyarray(depth_frame.get_data())
color_image = np.asanyarray(color_frame.get_data())
o3d_color_image = cv2.cvtColor(color_image, cv2.COLOR_BGR2RGB)
img_depth = o3d.geometry.Image(depth_image)
img_color = o3d.geometry.Image(o3d_color_image)
rgbd = o3d.geometry.RGBDImage.create_from_color_and_depth(img_color, img_depth, convert_rgb_to_intensity=False)
intrinsics = profile.as_video_stream_profile().get_intrinsics()
pinhole_camera_intrinsic = o3d.camera.PinholeCameraIntrinsic(intrinsics.width, intrinsics.height, intrinsics.fx, intrinsics.fy, intrinsics.ppx, intrinsics.ppy)
pcd = o3d.cuda.pybind.geometry.PointCloud.create_from_rgbd_image(rgbd, pinhole_camera_intrinsic)
pcd.transform([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])
voxel_down_pcd = pcd.voxel_down_sample(voxel_size=0.005)
alpha = 0.015
mesh = o3d.cuda.pybind.geometry.TriangleMesh.create_from_point_cloud_alpha_shape(voxel_down_pcd, alpha)
mesh.compute_vertex_normals()
pointcloud.points = pcd.points
pointcloud.colors = pcd.colors
if geom_added == False:
vis.add_geometry(pointcloud)
geom_added = True
vis.update_geometry(pointcloud)
vis.poll_events()
vis.update_renderer()
cv2.imshow('bgr', color_image)
key = cv2.waitKey(1)
if key == ord('q'):
break
elif key == ord("c"):
o3d.io.write_triangle_mesh("./capture/capture-"+str(number)+".ply", mesh)
number += 1
process_time = datetime.datetime.now() - dt0
print("FPS: " + str(1 / process_time.total_seconds()))
pipeline.stop()
cv2.destroyAllWindows()
vis.destroy_window()
del visこちらを使用して、点群データを 5つ 程作成してください。
データの確認
撮像した点群データを確認します。
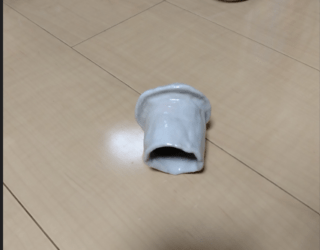
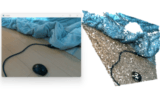
撮影対象はこちらです。
確認用プログラムを掲載しておきます。
import numpy as np
import open3d as o3d
import glob
pcd_ = glob.glob("./capture/*.ply")
pcd_list = []
for p in pcd_:
pcd = o3d.io.read_point_cloud(p)
pcd_list.append(pcd)
print(pcd)
np_pcd = np.asarray(pcd.points)
print(np_pcd, np_pcd.shape)
o3d.visualization.draw_geometries(pcd_list)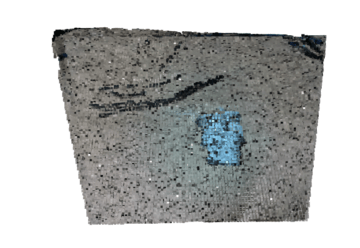
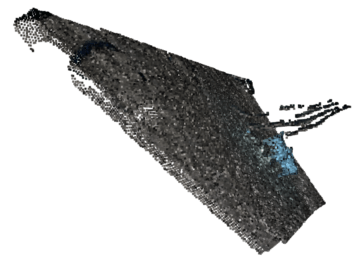
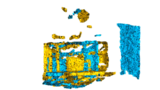
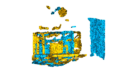
このように、5つの点群データは少しずつずれています。
点群データの合成
合成プログラムを掲載しておきます。
# ----------------------------------------------------------------------------
# - Open3D: www.open3d.org -
# ----------------------------------------------------------------------------
# The MIT License (MIT)
#
# Copyright (c) 2018-2021 www.open3d.org
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING
# FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS
# IN THE SOFTWARE.
# ----------------------------------------------------------------------------
"""Align multiple pieces of geometry in a global space"""
import open3d as o3d
import numpy as np
import glob
def load_point_clouds(voxel_size=0.0):
pcd_data = glob.glob("./capture/*.ply")
#pcd_data = ["./dataset/output-1.ply","./dataset/output-2.ply","./dataset/output-3.ply"]
pcds = []
for i in range(len(pcd_data)):
print(i)
pcd = o3d.io.read_point_cloud(pcd_data[i])
pcd_down = pcd.voxel_down_sample(voxel_size=voxel_size)
pcds.append(pcd_down)
return pcds
def pairwise_registration(source, target, max_correspondence_distance_coarse,
max_correspondence_distance_fine):
print("Apply point-to-plane ICP")
icp_coarse = o3d.pipelines.registration.registration_icp(
source, target, max_correspondence_distance_coarse, np.identity(4),
o3d.pipelines.registration.TransformationEstimationPointToPlane())
icp_fine = o3d.pipelines.registration.registration_icp(
source, target, max_correspondence_distance_fine,
icp_coarse.transformation,
o3d.pipelines.registration.TransformationEstimationPointToPlane())
transformation_icp = icp_fine.transformation
information_icp = o3d.pipelines.registration.get_information_matrix_from_point_clouds(
source, target, max_correspondence_distance_fine,
icp_fine.transformation)
return transformation_icp, information_icp
def full_registration(pcds, max_correspondence_distance_coarse,
max_correspondence_distance_fine):
pose_graph = o3d.pipelines.registration.PoseGraph()
odometry = np.identity(4)
pose_graph.nodes.append(o3d.pipelines.registration.PoseGraphNode(odometry))
n_pcds = len(pcds)
for source_id in range(n_pcds):
for target_id in range(source_id + 1, n_pcds):
transformation_icp, information_icp = pairwise_registration(
pcds[source_id], pcds[target_id],
max_correspondence_distance_coarse,
max_correspondence_distance_fine)
print("Build o3d.pipelines.registration.PoseGraph")
if target_id == source_id + 1: # odometry case
odometry = np.dot(transformation_icp, odometry)
pose_graph.nodes.append(
o3d.pipelines.registration.PoseGraphNode(
np.linalg.inv(odometry)))
pose_graph.edges.append(
o3d.pipelines.registration.PoseGraphEdge(source_id,
target_id,
transformation_icp,
information_icp,
uncertain=False))
else: # loop closure case
pose_graph.edges.append(
o3d.pipelines.registration.PoseGraphEdge(source_id,
target_id,
transformation_icp,
information_icp,
uncertain=True))
return pose_graph
if __name__ == "__main__":
voxel_size = 0.005
pcds_down = load_point_clouds(voxel_size)
o3d.visualization.draw(pcds_down)
print("Full registration ...")
max_correspondence_distance_coarse = voxel_size * 15
max_correspondence_distance_fine = voxel_size * 1.5
with o3d.utility.VerbosityContextManager(
o3d.utility.VerbosityLevel.Debug) as cm:
pose_graph = full_registration(pcds_down,
max_correspondence_distance_coarse,
max_correspondence_distance_fine)
print("Optimizing PoseGraph ...")
option = o3d.pipelines.registration.GlobalOptimizationOption(
max_correspondence_distance=max_correspondence_distance_fine,
edge_prune_threshold=0.25,
reference_node=0)
with o3d.utility.VerbosityContextManager(
o3d.utility.VerbosityLevel.Debug) as cm:
o3d.pipelines.registration.global_optimization(
pose_graph,
o3d.pipelines.registration.GlobalOptimizationLevenbergMarquardt(),
o3d.pipelines.registration.GlobalOptimizationConvergenceCriteria(),
option)
print("Transform points and display")
for point_id in range(len(pcds_down)):
print(pose_graph.nodes[point_id].pose)
pcds_down[point_id].transform(pose_graph.nodes[point_id].pose)
o3d.visualization.draw(pcds_down)上記を実行すると、以下の出力が得られます。
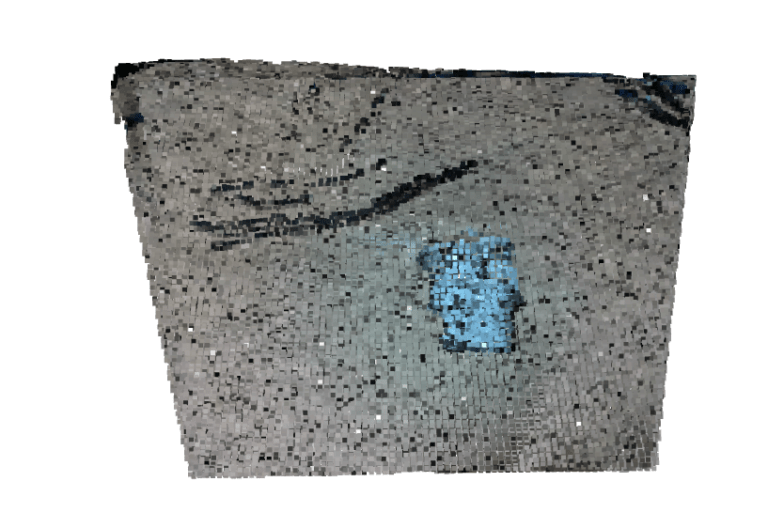
最初に表示される window は元データです。
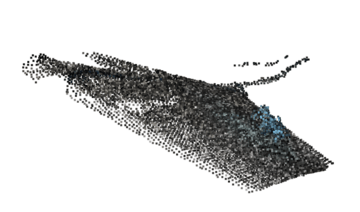
1s 以下の計算後、以下の点群データが表示されます。
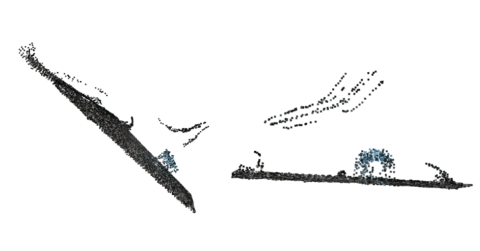
非常に精度良く合成できました!
おわりに
今回は、点群データの合成を前回よりも精度向上させて実行しました。
前回と比較すると、かなり精度良くなりました。
これを利用して次回は、YOLOv5と連携させていきます。
コメント