 ROS2
ROS2 Dobot MG400 の各jointへ数値を送信 実践編【ROS2-Foxy】
Dobot MG400 の各jointへ数値を送信 実践編【ROS2-Foxy】今回は、今までのまとめとして、実際にGazebo上で MG400 が動いていることを確認していきます。
ROS2 ROS2 Python 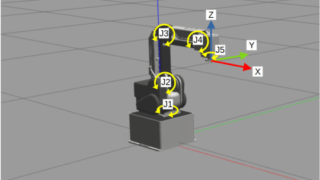 Python
Python  ROS2
ROS2  ROS2
ROS2  ROS2
ROS2  AI
AI  AI
AI  AI
AI