 Python
Python 【Windows11】Python + Open3D で点群データの合成2
【Windows11】Python + Open3D で点群データの合成について説明します。前回は、合成がうまくいかなかったので、合成の検証を行いました。
Python  Python
Python 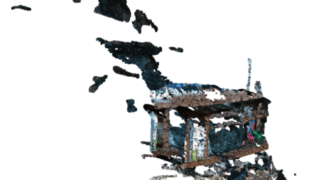 Python
Python 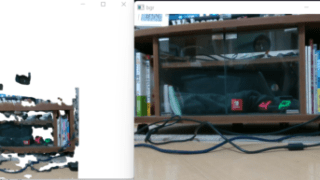 Python
Python 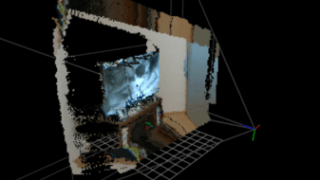 Python
Python  ROS2
ROS2  Python
Python  Python
Python  ROS2
ROS2  ROS2
ROS2